Figura 1: Entrada do exemplo da figura 4.43
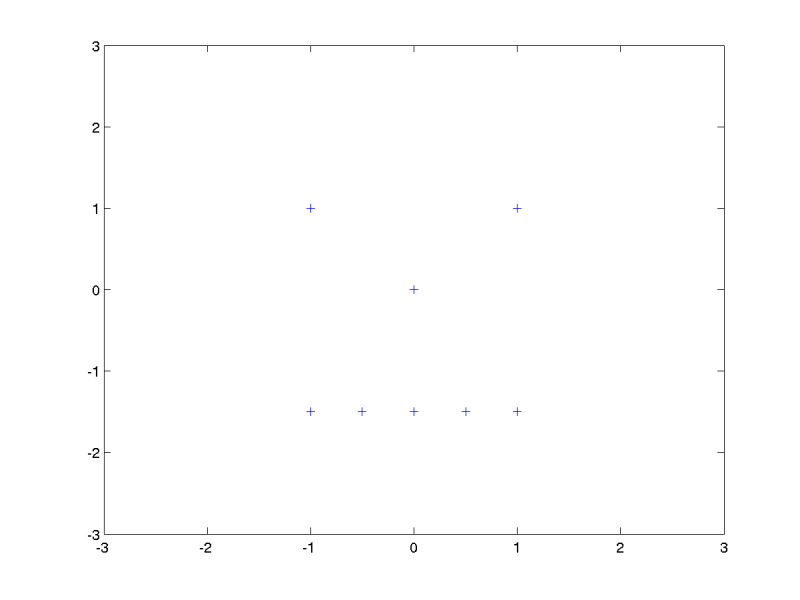
Figura 2: Pontos de controle do exemplo da figura 4.43
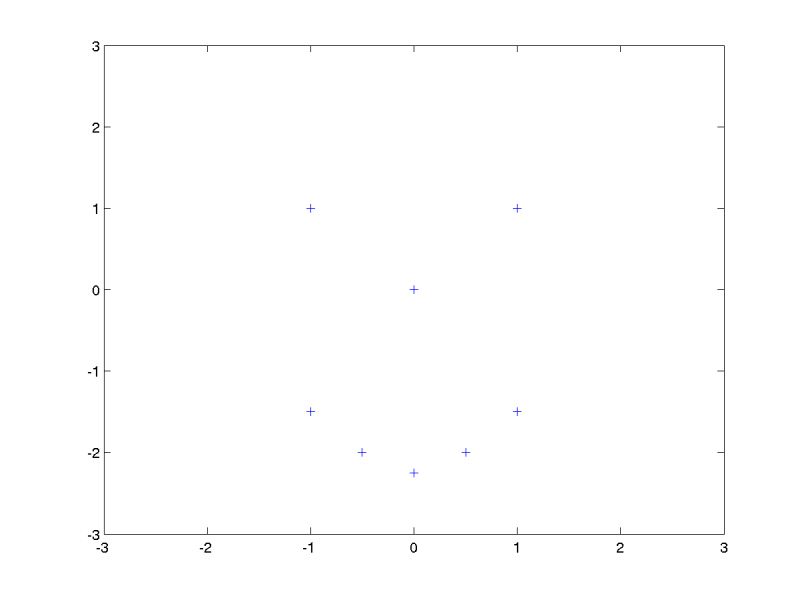
Figura 3: Conjunto de marcos de uma forma sobre a qual será aplicada a transformação obtida a partir das formas das figuras acima
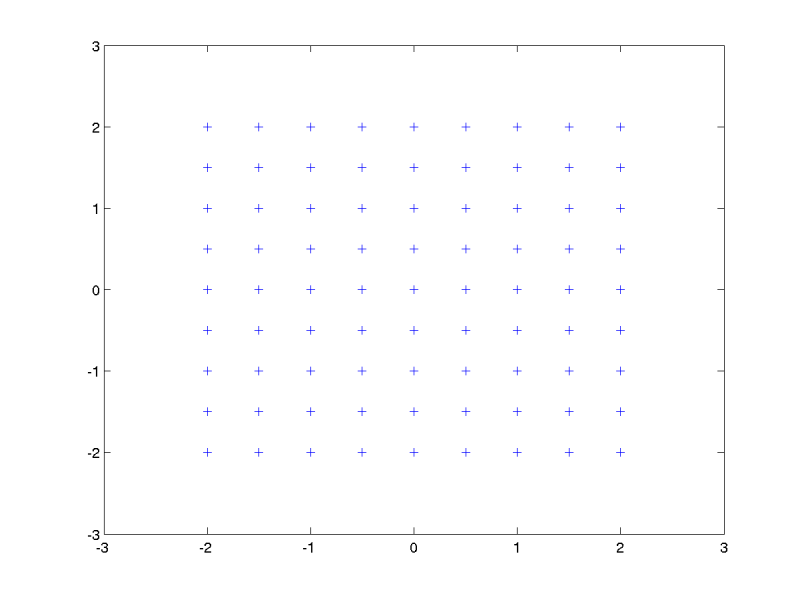
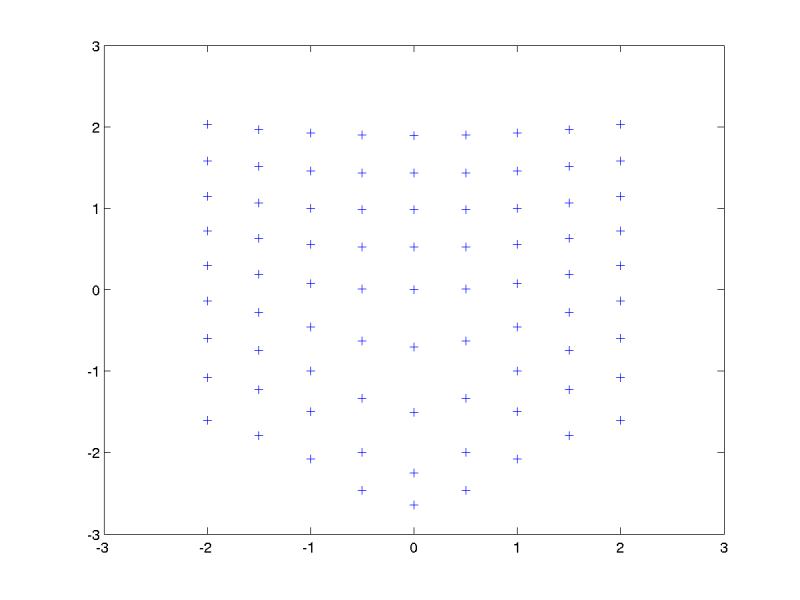
Figura 4: Resultado da transformação
 No segundo teste utilizei o programa para executar o exemplo para thin-plate
splines 1D da página 322 do livro, utilizando a função para duas dimensões
com os mesmos valores de pontos de controle em cada dimensão. Os resultados
obtidos foram iguais aos do livro, com exceção da energia de dobramento obtida,
que foi o dobro da obtida no livro (como esperado, já que a energia de
dobramento no caso 2D é igual à soma das energias de dobramento em cada
dimensão). Abaixo segue a saída do MATLAB referente a este teste.
No segundo teste utilizei o programa para executar o exemplo para thin-plate
splines 1D da página 322 do livro, utilizando a função para duas dimensões
com os mesmos valores de pontos de controle em cada dimensão. Os resultados
obtidos foram iguais aos do livro, com exceção da energia de dobramento obtida,
que foi o dobro da obtida no livro (como esperado, já que a energia de
dobramento no caso 2D é igual à soma das energias de dobramento em cada
dimensão). Abaixo segue a saída do MATLAB referente a este teste.