Imagem de entrada e sobreposição às linhas retas detectadas, para thr = 20
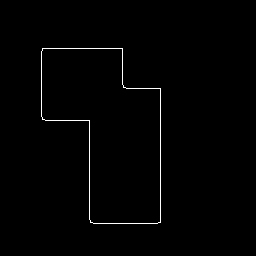
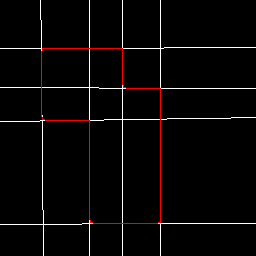
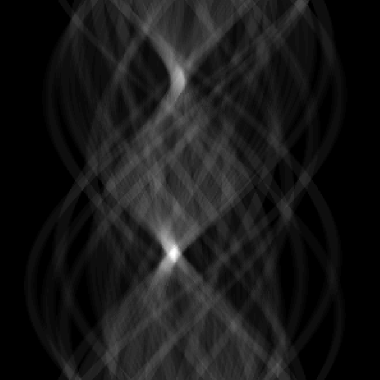
Imagem com ruído, e linhas retas detectadas para thr = 5, 7 e 10




>> threshold = 5;
>> Ntheta = 300;
>> Nrho = 300;
>> img = imread('img_entrada.bmp');
>> lines = hough(img, Ntheta, Nrho, threshold);
>> imwrite(lines, 'retas.bmp');
Imagem de entrada e sobreposição às linhas retas detectadas, para thr = 20
Imagem com ruído, e linhas retas detectadas para thr = 5, 7 e 10